免費(fèi)咨詢熱線:0769-85157716
官 方 微 信 號(hào):13332662668
官 方 微 信 號(hào):13332662668

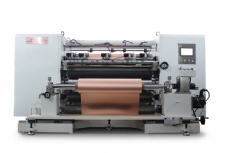
通常的熱熔膠涂布機(jī)控制系統(tǒng)中一般控制結(jié)構(gòu)與其他自動(dòng)化機(jī)器相同,業(yè)已形成了相對(duì)穩(wěn)定的模式,知識(shí)庫由數(shù)學(xué)過程模型、辨識(shí)與估計(jì)算法、控制器運(yùn)行方法和控制性能判據(jù)組成。由于熱熔膠涂布機(jī)自動(dòng)化系統(tǒng)的實(shí)時(shí)約束、任務(wù)的非線性、有限的執(zhí)行器速度和范圍、魯棒性、算法的明晰性、可維護(hù)性等因素的存在,—些基本的設(shè)計(jì)要求限定了算法的執(zhí)行,最為重要的是,機(jī)電過程與控制的同步設(shè)計(jì),即系統(tǒng)的靜態(tài)和動(dòng)態(tài)性質(zhì),執(zhí)行器的類型和位置,傳感器的類型和位置,均要適當(dāng)?shù)卦O(shè)計(jì),使全局的控制性能良好,所以在實(shí)時(shí)條件下只能用簡單的算法或軟件模塊來完成控制任務(wù),一些熱熔膠涂布機(jī)機(jī)電一體化系統(tǒng)采用較低層的一般控制結(jié)構(gòu)。







械有限公司")
版權(quán)聲明:本站所有設(shè)備圖片及資料,視頻素材信息均均為東莞市永皋機(jī)械有限公司版權(quán)所有,未經(jīng)協(xié)議本網(wǎng)授權(quán)不得轉(zhuǎn)載、摘編或利用其它方式使用。已經(jīng)本網(wǎng)授權(quán)使用作品的,應(yīng)在授權(quán)范圍內(nèi)使用,并注明“來源:東莞市永皋機(jī)械有限公司”。違反上述聲明者,本網(wǎng)將追究其相關(guān)法律責(zé)任。